Vivisektion des Robomaxx - zu den „Vierjahreszeiten“ von Vivaldi
1) Wer acht Schrauben für das Gehäuse verwendet, hat normalerweise etwas zu verbergen :)2) Überraschung - „Sealed Lead Battery“, 6V / 2,8Ah - kein NiCd-Mist
3) Je zwei Taster pro Seite in der Stossstange integriert (parallel). Wozu? "Fail-Safe"? Damit das Baby nicht überrollt wird?
4) gemustertes Flachbandkabel von den Programmwahlschaltern zur Platine - 8 Kabel: 3 Schalter, drei LEDs, GND?
5) die Motoren sind brav entstört, ich sehe Vorwiderstände mit 22 Ohm an Plus- und Minuspol des Motors
6) Schmelzsicherung mit Sicherungshalter -edel !
7) Ladebuchse mit Diode gegen Verpolung gesichert
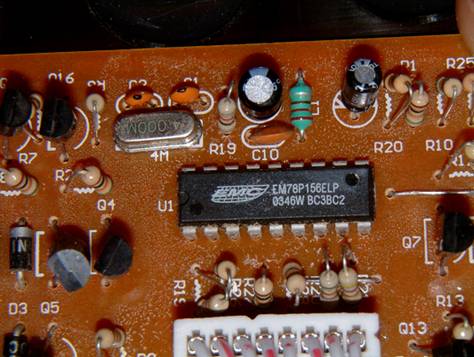
8) Prozessor EM78P156ELP - 4Mhz getaktet (pinkompatibel mit PIC16F84)
|
Abbildung 1 - der Prozessor |
9) Quarz mit 20pF Kerkos (ich würde immer 22pF nehmen :) )
10) die Lötseite - sieht robust aus:
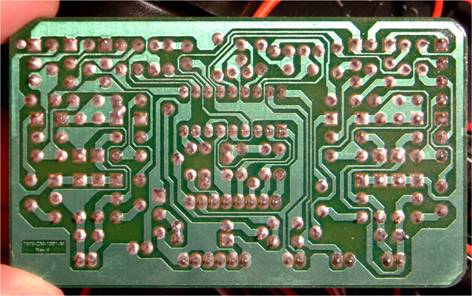
Abbildung 2
11) Stecker
auf dem Board:
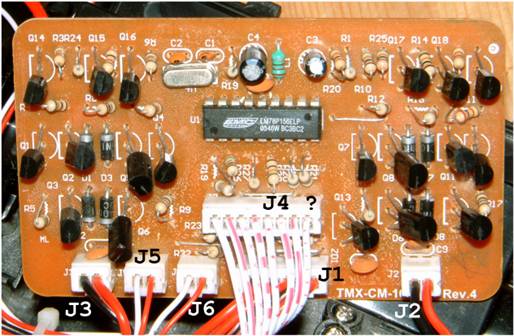
Abbildung 3 - Stecker
J2: Versorgung linker Motor (rot = plus, schwarz = GND)
J3: Versorgung rechter Motor
J5: Taster links (Pin1 = Signal, Pin2 = GND)
J6: Taster rechts
J4: Anschluss Bedienfeld
J1: Anschluss Stromversorgung, Lüfter- und Bürstenmotor sind mit der Versorgungsspannung verbunden (Pins 2,4,6 = GND, Pins 1,3,5 = Power;
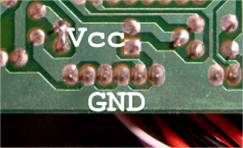
Abbildung 4 Detail Jumper J1
Bürstenmotor mit 22Ohm Vorwiderständen vor Plus- und Minuspol, der Lüfter hat zwei Teile (in Schrumpfschlauch) in Serie vorgeschaltet, die ich nicht identifizieren kann (Spule? Widerstand?):

Abbildung 5 - unbekanntes Teil
12) die Transistorenscharen teilen sich ja hübsch links und rechts auf und dürften der Steuerung der Fahrmotoren zu zuordnen sein
13) was ich noch nicht gefunden habe ist die Glättung/Spannungsregelung von Vdd
14) einseitige Platine, verblüffend wenig Drahtbrücken
15) noch
eine Überraschung: die LEDs in der Programmwahl werden vom Mikroprozessor
geschaltet, nicht etwa vom jeweiligen Schalter :)
(damit könnte man prima den Status des Robomaxx anzeigen, etwa so: Drei LEDs blinken - "mein Staubbehälter ist voll"; alle LEDs aus - "mein Akku ist leer" :) ).
16) Belegung von J4: Pin1: Vdd
Pin2: GND
Pin3: LED „C“ über 470Ohm Vorwiderstand an Pin9 des Micros (P63)
Pin4: Schalter „C“ an Pin6 des Micros (P60/Int)
Pin5: Schalter „B“ an Pin2 des Micros (P53)
Pin6: LED „B“ an Pin8 des Micros (P62)
Pin7: Schalter „A“ an Pin1 des Micros (P52)
Pin8: LED „A“ an Pin7 des Micros (P61)
17) Belegung von J6: Pin1: GND; Pin2: Schalterpaar „links“ an Pin17 des Micros (P50)
18) Belegung von J5: Pin1: Schalterpaar „rechts“ an Pin18 des Micros (P51); Pin2: GND
19) alle Schalter werden über 10K Widerstände „gepull-upt“ an Vdd, nicht an die „Powerleitung“
20) Pin3 (TCC- Realtime-Clockcounter) des Micros ist nicht verbunden, dazu heisst es im Datenblatt des Chips „must be tied to Vdd oder Vss if not in use“: fast so etwas wie ein Designfehler :)
21) Pins 10 und 11 machen die Steuerung des linken, Pins 12 und 13 des rechten Fahrmotors
22) im Oszilloskop passiert während des normalen Fahrens folgendes:
23) Gemessen habe ich erstmal mit zwei Tastern an den Pins 10 und 11, jeweils gegen GND. Da ich das Ergebnis nicht so ganz verstand (und ja auch den Schaltplan nicht ganz aufgedröselt habe), habe ich kurz entschlossen mal „differentiell“ gemessen: Pin 10 als Signal, Pin 11 als Masse[grüne Kurve]. Sinngemäß das Gleiche mit den Pins 8 und 9 für die rechte Seite[schwarze Kurve]. Der Robomaxx ist im Modus „B“. Das linke Rad dreht sich nur vorwärts, gelegentlich zeigt es zwei kurze Stops, das rechte Rad dreht in der Zeit zwischen den Stops rückwärts:
Links Rechts
vorw. vorw.
stop stop
stop rückw.
stop stop
vorw. vorw.
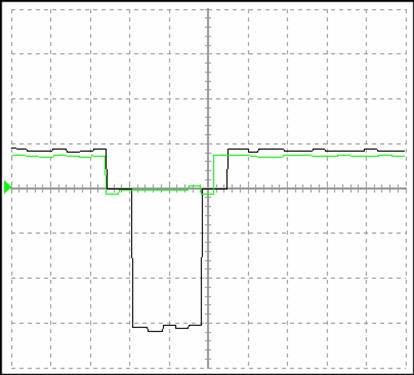
Abbildung 6 - Normale Fahrt
Ich schließe daraus: ca. +1V für „Vorwärts drehen“, 0V für „stehen“ und -3V für „rückwärts“. Richtig?
Probe: Kontakt links:
links rechts
vorw. vorw.
stop stop
rückw. rückw.
stop stop
stop rück.
stop stop
vorw. vorw.
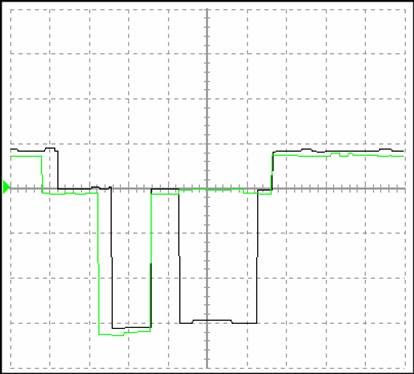
Abbildung 7 - Kontakt links
Mal sehen. Stimmt :)
Und noch einmal:
Kontakt beidseits:
links rechts
vorw. vorw.
stop stop
rückw. rückw.
stop stop
stop rückw.
stop stop
vorw. vorw.
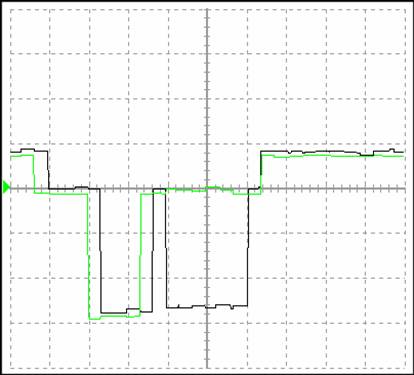
Abbildung 8 - Kontakt beidseits
Stimmt auch. Schaut gut aus, Herr Baurat!